
 中文
中文
中文
中文
中文
中文

尚华清(中国科学院深圳先进技术研究院)摘要本文提出了一种基于自适应导纳控制的控制策略,用于在经椎弓根固定手术中为协作机器人(COBOT)提供实时辅助夹具。该系统通过三模块结构,包括导纳模块、虚拟夹具生
尚华清(中国科学院深圳先进技术研究院)摘要本研究探讨了经椎弓根螺钉应用中局部组织电阻的变化,旨在提高手术过程中定位螺钉路径的准确性。研究在尸体和动物模型上测量了椎弓根和邻近组织的电阻,验证了不同组织之
尚华清(中国科学院深圳先进技术研究院)摘要本文研究了椎间盘参数变化对脊柱生物力学行为的影响,旨在揭示输入参数如何影响多体系统(MBS)模型中的结果。通过建立包含椎间盘、韧带和关节的MBS腰椎模型,作者
尚华清(中国科学院深圳先进技术研究院)摘要本文提出了一种基于力信息的多层模糊控制方法,应用于机器人辅助减压椎板切除术中以提高操作的精度和动态性能。利用预处理的CT图像重建3D模型进行路径规划,并通过2
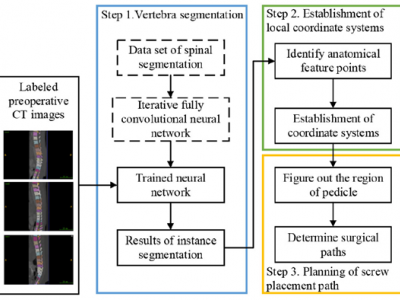
尚华清(中国科学院深圳先进技术研究院)摘要本文提出了一种基于术前CT图像的自动椎弓根螺钉路径规划方法,旨在提高脊柱手术的精度。通过深度学习网络对椎骨进行分割和识别,并在每个椎骨上建立局部坐标系,以便根
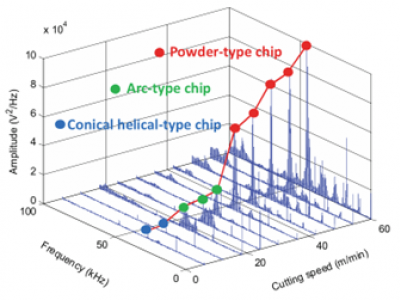
尚华清(中国科学院深圳先进技术研究院)摘要本文研究了在骨组织微钻削过程中的切屑形成、钻削深度和故障监测方法,利用声发射(AE)传感技术捕获加工条件的变化。研究分析了不同的切屑类型,并提出基于小波能量比
尚华清(中国科学院深圳先进技术研究院)摘要该研究比较了两种用于机器人辅助椎板切除术的力感知技能学习方法:阻抗模型法和模仿学习法。阻抗模型法基于弹簧-阻尼模型,采用支持向量回归来映射手术特征参数,手动提
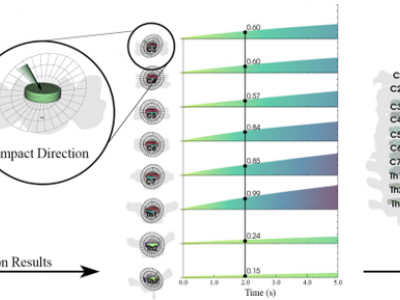
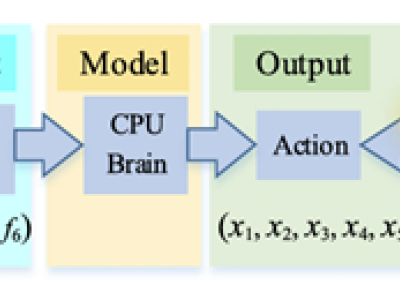
尚华清(中国科学院深圳先进技术研究院)摘要本文提出了一种用于脊柱手术模拟结果探索的可视化应用,旨在支持生物力学模拟研究并帮助实施基于模拟的手术分析。该工具将个体化患者数据与模拟结果相关联,展示受力方向