
 中文
中文
中文
中文
中文
中文


一、研究摘要 传统组织粘合剂多为胶体或水凝胶,虽具一定粘附性,但在形状适配与功能设计方面存在局限。麻省理工学院赵选贺团队开发出一种可直接打印的3D组织粘合剂,不仅具备快速、强力、可适应湿润组织表面的粘
摘要随着生物打印技术的发展,细胞与生物材料的同步沉积为组织再生领域注入了新的活力。然而,生物打印过程中不可避免的细胞损伤以及生物打印细胞负载支架的机械稳定性差,严重限制了其应用。本研究提出了一种机械辅
摘要有效的城市社区空间规划对城市可持续发展起着至关重要的作用。尽管地理信息系统和计算机辅助设计带来了便利,但确定土地使用和道路的布局仍然严重依赖人类专家。在这里,我们提出了一个人工智能城市规划模型来生
摘要 从工业外骨骼到植入式医疗设备,与人密切互动的机器人有望改善我们生活的方方面面。然而,设计这些系统非常具有挑战性;人类非常复杂,在许多情况下,我们对机器人设备的反应方式无法足够准确地建模
摘要空间地标对于描述样本或地点之间的组织学特征,在显微镜中跟踪感兴趣的区域以及在共同的坐标框架内配准组织样本至关重要。尽管其他研究已经探索了无监督地标检测,但现有方法并不适合组织图像数据,因为它们通常
摘要在本文中,我们提出了一个规划框架,该框架在移动机器人导航期间结合使用隐式(机器人运动)和显式(视觉/音频/触觉反馈)通信。首先,我们开发了一个模型,该模型可以近似人类导航中的连续运动和离散行为模式
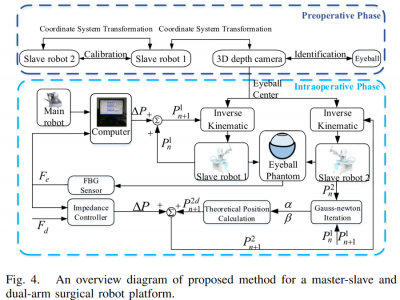
肖烨(西安交通大学)摘要在眼科手术中,重新调整视网膜视野是一种常见的做法,通过旋转眼球来检查病变区域。对于远程操作手术机器人来说,这可能是一项具有挑战性的任务,因为与传统手术相比,它需要高精度的手部协
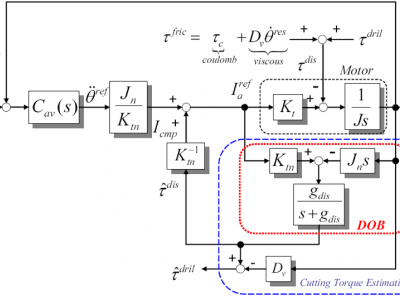
尚华清(中国科学院深圳先进技术研究院)摘要本文提出了一种基于无力/扭矩传感器的钻头切削功率估算方法,以评估牙科手术中的钻头磨损。利用扰动观测器(DOB)提取切削力,该系统通过内部传感器(如电流传感器和